Season Update!
Now that we've gotten a bit into the season, let's see what progress we've made! This blog will include an update on field progress, CAD and Build Teams, Programming Team, and Business.

Isabel S.

Field Update
As soon as the game was released, one of our first priorities, aside from planning an initial robot skeleton, was building the field. Every year, Stryke Force builds a replica of half of a playing field, which is useful for testing robot mechanisms, human player mechanics and most importantly, driving practices. This is a collaboration between students, parents with woodworking expertise, and mentors banding together to manufacture the different aspects of our field. This is primarily to be more cost-effective but it also gives the students an opportunity to expand their skillset through woodworking.

Pictured to the right is the base of the hub (the place where the yellow balls are scored for points.) Then, pictured on the left, you can see the final steps of creating the final product of the hub: installing the clear “bowl” you can see at the top. This is the goal the robot will be aiming for to shoot its fuel (yellow balls) into to score points for our alliance.

The hub is also now positioned in the exact spot it needs to be on the field, and we have also built both the bumps, also pictured to the left, and the trenches.
Now when we need to start calibrating, making sure the measurements are standard between the robot’s code and the field so the pre-programmed code runs accordingly, and testing on the field, we have the elements to simulate an official match.
Our next task in regards to field building will be building the tower (the ladder-like structure), and then we will have a fully functional practice field!
CAD & Build Update
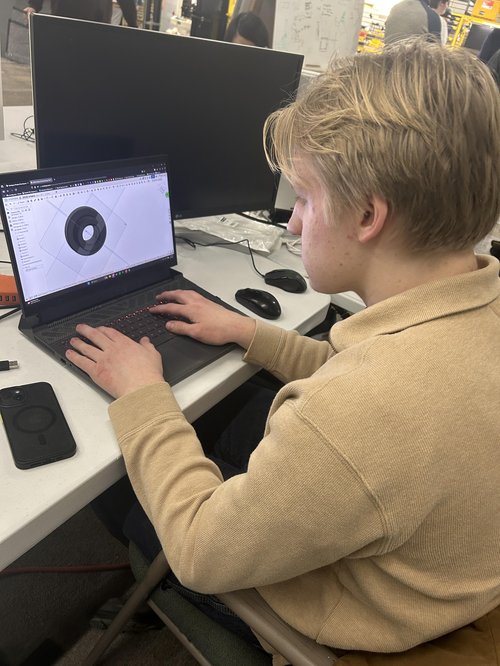
Once the game was released, we got right to work on our CAD. For those unfamiliar with the term, this means Computer Aided Design, which is essentially the "instructions” to building our robot. This includes specific measurements and arrangements to make sure we all agree on a design and that it’ll work, so we avoid having to redo the building process an excess amount. Every single piece on the robot is put through the CAD designing process, so we have a clear idea for the next steps to take for the building process.
Since this year’s game is similar to the game from 2017, which we were world champions for (fun fact!), we have a better grasp of what types of designs will be most efficient regarding the ability to score the most amount of points in the least amount of time. This experience in turn is able to speed up our overall build and design process, allowing more time for the programming of the robot and driving practice time.
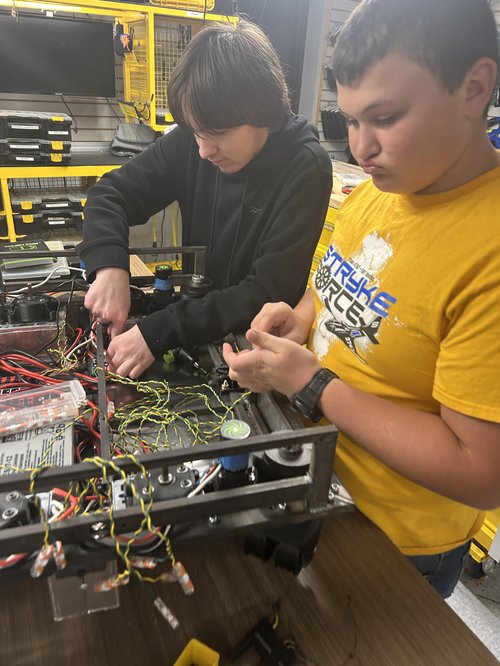
For the build update, we’ve started following the instructions from CAD to start creating our “protobot.” This is our first draft of the robot, so we can resolve any building issues and edit it before creating the final design. In the final design of our robot, there’s zero room for mistakes, so by tackling the issues beforehand makes the process more efficient by avoiding constantly backtracking.
One of the first things we build is the base of the robot, which is pictured to the left. We decided to go with a smaller, square design to ensure speed from its compactness. By starting with the base, we’re able to have a physical visual of how the different pieces of the robot will be “mapped out.” In this case, we will have a better representation of where we’ll place the shooter, hopper (the system that will hold fuel), and climbing mechanisms.
The next steps in our building process will include finishing the protobot and fixing any issues that arise. Stay tuned for our robot reveal to see our final product!
Programming Update

In terms of programming, our students have been coding different aspects of our protobot. Since our basic movement code remains roughly the same, we’ve been working on the autonomous pathing, fuel sensing, automatic shooting, and battery conservation.
In terms of autonomous pathing, we’re working on figuring out different approaches, in terms of strategy, in order to mesh and be compatible with other teams at competitions. We also are working on optimizing the pathing to earn the most points in the shortest amount of time, to start the match with our hub deactivated. This is a crucial part of the strategy to score the most amount of fuel points in auto to earn this advantage in the match, so we’re working hard to create as many combinations as possible.
For fuel sensing, we’re working on the robot to detect balls on the field, which makes it easier for our drivers to pick up the game pieces, since it’s an automated function. Then from that positioning, we’re working on coding the automatic shooter to be able to launch fuel from everywhere on the field, saving time as opposed to only being able to shoot from a specific place.
Finally, we’re also working on a battery conservation mode, which you can think of similar to a phone’s “low power mode.” In case of emergency during a match, if a robot doesn’t have enough battery to fuel all of its desired motors, it will cut off energy to different sources, allowing the robot to still run but at a slower efficiency.
The next projects for our programming team will include receiving the protobot, once finished, and working to tune the robot.
Stay tuned for our robot reveal, and keep up with us on social media to see more!